
<<本研究室で扱っている研究テーマ
麻痺した手足のFES制御システムの開発
フィードバック誤差学習を用いた学習型FES制御器の開発
FES制御の制御対象となる筋骨格系は,制御が非常に難しい制御対象です.
例えば,筋骨格系には冗長性があります.具体的には,制御する関節角度の数よりも電気刺激する筋の数のほうが多いため,目標の関節角度を決定しても,筋への刺激量は一意には定まりません.下の図に一例を示しますが,手関節の2自由度運動は,4つの筋によって複雑に構成されます. 他にも,筋骨格系の電気刺激に対する応答特性には,強い非線形性,疲労などによる時変性,大きなむだ時間や時定数があり,制御を難しくしています.これらに加えて,個人差が大きく,一人一人違った特性を持ちます.
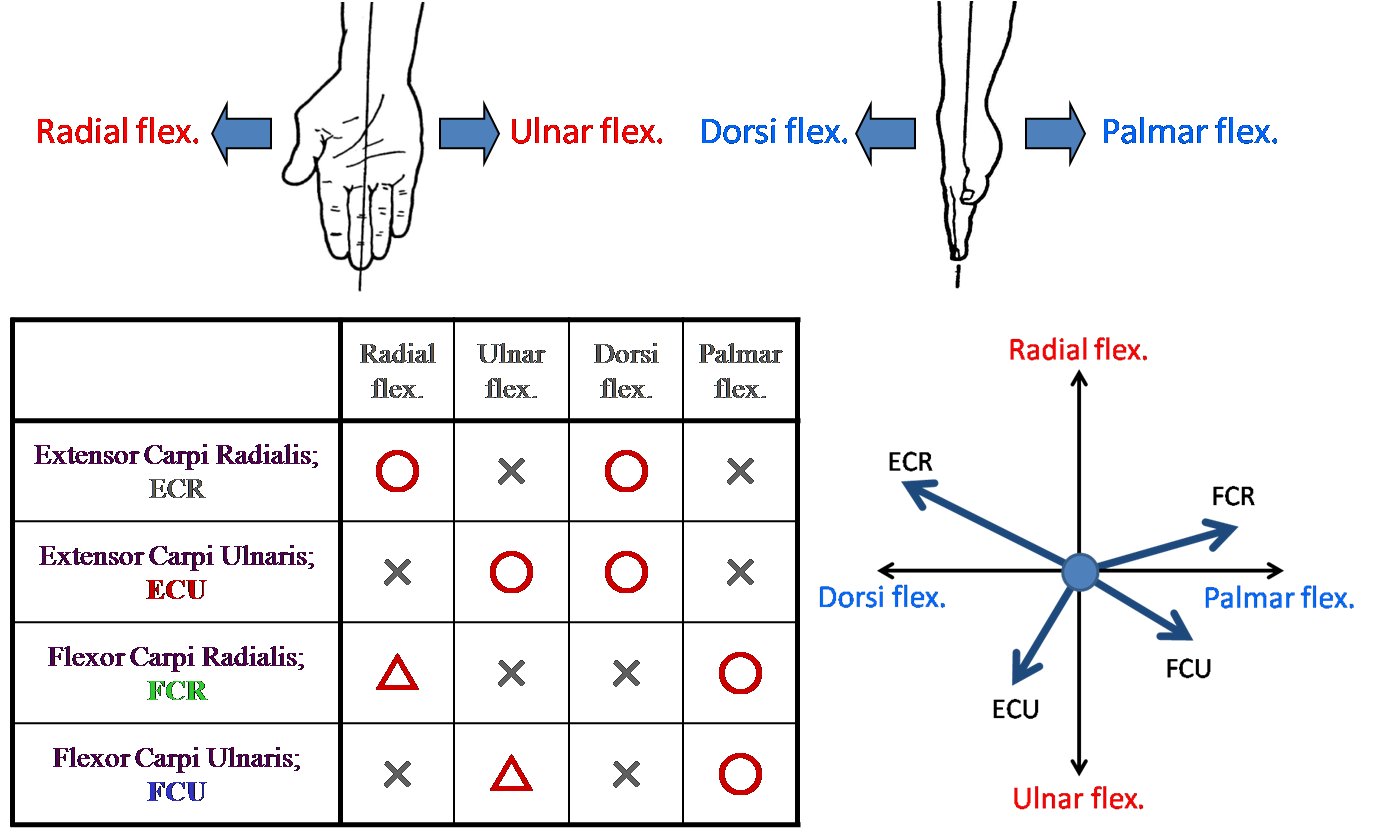 |
| 図:前腕の4筋刺激による手関節2自由度運動 |
| 関節の自由度よりも刺激筋の数ほうが多く,それぞれの筋が複数の方向に対して影響を及ぼすため,制御が複雑である |
我々のグループでは,フィードバック誤差学習法を適用したFES制御器の研究開発を行って行っています. FES制御中に制御対象の特性を学習することで,非線形性や個人差に対応した開ループ制御器を構築することが可能になります.
フィードバック誤差学習法を用いた制御器は,フィードフォワード制御器とフィードバック制御器を併用したハイブリッド型の制御器です.そのため,フィードバック制御器による外乱補償が行え,なおかつフィードフォワード制御器により速い目標軌道に対しても安定した制御を行うことが可能となります.また,一般的なハイブリッド制御器では,事前にフィードフォワード制御器の調整を行う必要や,筋特性が変化した場合にはオフラインでの再調整を行う必要となりますが,フィードバック制御器の出力を誤差信号としてモニタすることで制御と同時にフィードフォワード制御器の学習(調整)を行うことができるため,初期調整や再調整の手間がなく,臨床において医師や患者の負担を軽減することが期待できます.
現在は,計算機上に構築した上肢の筋骨格系のモデルを用いた計算機シミュレーションにより,前腕の4筋刺激による手関節2自由度運動へのフィードバック誤差学習法を用いたFES制御器の適用について研究しています.
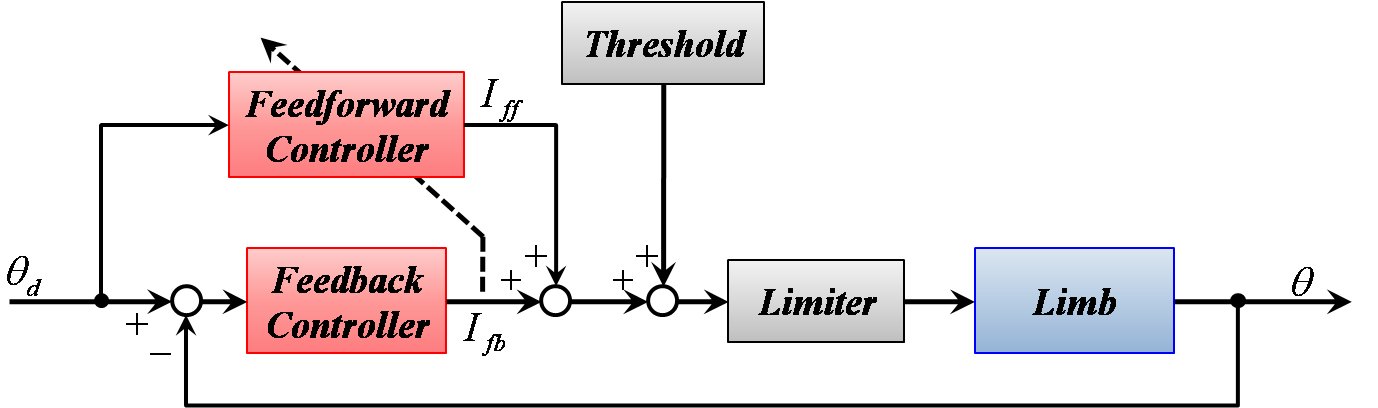 |
| 図:フィードバック誤差学習法を用いたFES制御器のブロック線図 |
| フィードフォワード制御器として3層階層型ニューラルネットワークを,フィードバック制御器としてPID制御器を用いた.ニューラルネットワークは,PID制御器の出力を誤差信号として誤差逆伝搬法を用いることにより制御対象の逆モデルを学習する. |
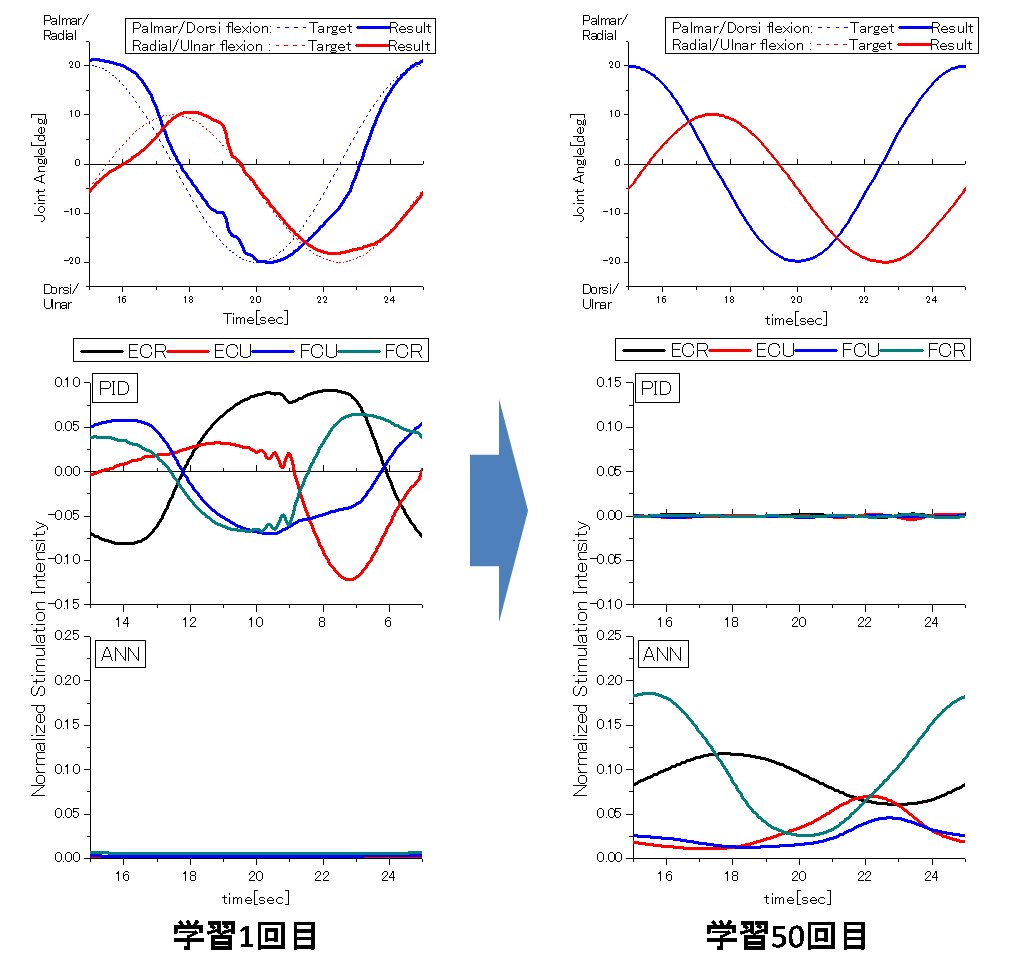 |
| 図:学習1回目および学習50回目の関節角度と角制御器の刺激出力の軌跡 |
| 学習初期では,目標軌道と実現軌道との間に大きなずれが生じているが,学習後期では,軌道はほぼ一致する.また,学習初期では,ほぼPID制御器のみで制御をおこなっているが,学習後期ではANNからの出力が大きくなり,PID制御器の出力はほぼ0になっている. |
ファジィ制御器による下肢の多関節制御
歩行中の下肢の動作は,股関節・膝関節・足関節の3つの関節が相互に影響し合う複雑な多関節運動となっています.そのため,FESにより歩行動作を再建するためには,優れた多関節制御法が必要となります.
FESにより歩行を制御する場合に注意する点として,
- 歩行動作は3関節の動きが相互に影響しあう複雑な多関節運動である
- 制御対象である筋骨格系は,制御する関節角度の数よりも電気刺激する筋の数のほうが多く,一つの動作の再建のための刺激スケジュールが複数存在する
- 筋の刺激特性は個人差が大きく,筋疲労や筋増強効果により電気刺激応答特性が常に変化するため,それらに対応できる必要がある
といった点が挙げられます.
当研究室では,片麻痺患者(右半身or左半身だけ麻痺のある患者)の歩行再建を対象に,関節角度を追従制御するのではなく,目標関節角度軌跡上の特徴的な点を目標角度とするCycle-To-Cycle制御法の適用を検討しています.
この制御法では,一歩前の目標角度と関節角度の差を入力として,次の一歩の刺激データ(例えば,刺激印加時間)を決定します.1つの動作を制御するためには,刺激スケジュールを利用して,複数の筋,複数の目標角度を制御します.
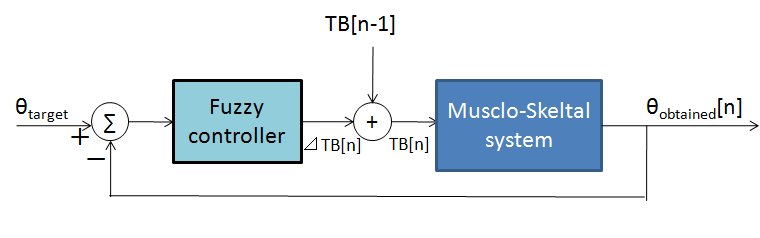 |
| 図: Cycle-to-Cycle制御に基づくファジィ制御系のブロック線図 |
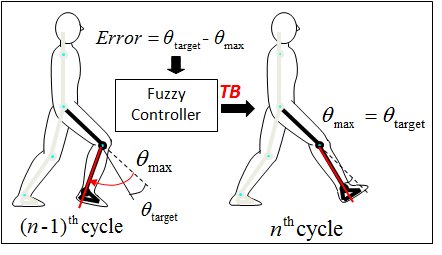 |
| 図: 遊脚期の膝関節最大伸展制御におけるCycle-to-Cycle制御 |
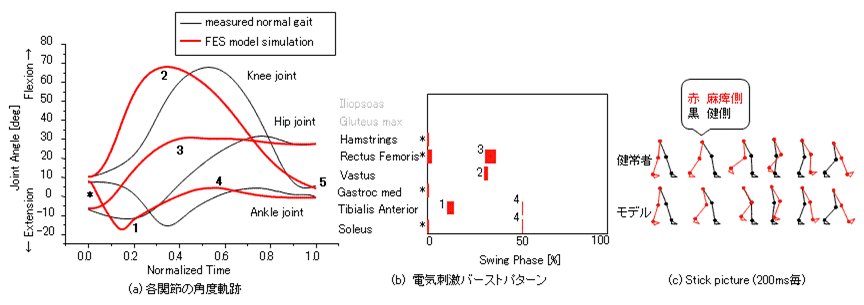 |
| 図: 筋電図に基づく刺激スケジュールによる制御のシミュレーション結果(20Cycle目) |
同じ筋に同じ電気刺激を印加しても,個人差(身長,体重,最大筋張力等,筋骨格特性)や時変性によって関節の動きは変わります.
そこで,出力メンバシップ関数調整器を導入することで,個人差や時変性に対応できるようにしています(図).
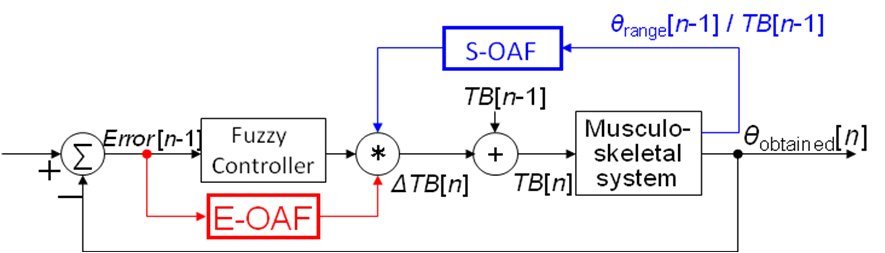 |
| 図4 出力メンバシップ関数調整器を付加したファジィ制御系のブロック線図 |
誘発筋電図(M波)を用いた筋疲労評価とその応用
私たちは,筋疲労の進み具合を,だるいという感覚や小刻みに震えるという動作で知ることができ,その後の疲労によって起こる危険性を未然に防ぐことができます.
ところが,麻痺や病気でFESを使用する患者さんでは,疲労の感覚がわかりにくいことや,電気刺激が健常者に比べて疲労を早期に誘発するという問題があります.このことは,例えばFESで歩行する場合に転倒などの危険を引き起こすことや,疲労状態にあるにもかかわらず強い刺激を与え続けることで体へ負担がかかることが考えられます.
このような観点から,FES制御中の筋疲労を推定・評価する方法について研究を行っています.
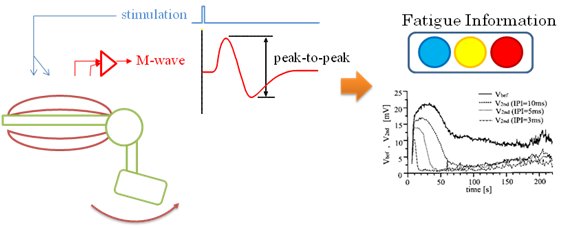
筋疲労評価には,化学的,工学的に様々なアプローチが検討されており,私達の研究では誘発筋電図(M波)を用いています.
M波は,電気刺激に同期した筋系の興奮状態を電気的に観測したもので,表面電極を用いた非侵襲的方法でも比較的簡単に計測することができます.振幅は活動する運動単位(Motor Unit,MU:ひとつの運動ニューロンと,それが支配する筋線維のグループ)の数の情報を含み,その形状は活動するMUの種類などの情報を含んでいます.しかし,電極の位置や生体の経時変化の影響を受けて再現性が悪いという問題点があり,また,複雑に絡み合った筋系の各情報をマクロ的に計測した場合の評価方法が確立されておらず,実用的な評価方法は実現されていません.
この研究では,FESの動作再建に用いる一定周波数の刺激パルス列の一部をダブルパルスとして,誘発されたM波を利用することで疲労の早期検出と進行度の評価を行える方法の開発を目指しています.
そして,無線型表面FESシステム及びファジィ制御器による下肢制御との組み合わせでリハビリ支援システムとしての活用を検討しています
 |