
<<本研究室で扱っている研究テーマ
リハビリ・健康支援のための運動計測システムの開発
歩行解析のためのウェアラブルセンサシステムの開発
歩行運動などのリハビリテーションでは,10m歩行の時間や歩数,自身の知識や経験に基づく視覚情報などから評価を行うことが一般的といえます.これは,限られた時間と場所で評価を行うには実用的ですが,定量的・客観的評価のためには動作解析システムの利用が有効であると考えられます.また,近年では,健康のためのウォーキングなどを行う方も多くなり,健康面で質の良い歩行を評価するために,歩行計測ができるシステムの必要性が高まっています.
しかし,3次元動作解析装置や床反力計など,研究分野などで一般的に使われている動作解析システムは高価であり,計測空間が限られ,装置やデータ処理が複雑なため,臨床や実環境での計測には適さないと考えられます.
そのため我々の研究グループでは,小型軽量で安価なセンサである加速度センサとジャイロスコープを用いた,下肢関節角度やストライド長などの歩行データを計測できるウェアラブルセンサシステムの開発を行っています.
加速度センサは加速度を計測するセンサ,ジャイロスコープは角速度を計測するセンサです.これらのセンサは近年,小型化・低価格化が進んでいて,それに伴い様々な分野での応用が進んでいます.例えばゲーム機のコントローラや携帯電話,デジタルカメラなど,我々の身近な製品でもたくさん応用されています.我々の研究グループでは,それらのセンサを用いたウェアラブルセンサシステムを開発し,リハビリ・ヘルスケア分野に応用することを考えています.
加速度センサとジャイロスコープを搭載した小型センサユニットを身体に装着することで,その部位の加速度と角速度を計測することができます.本システムでは,それらの加速度データと角速度データを組み合わせ,歩行中の下肢関節角度,ストライド長,歩行事象などの歩行データを計測する方法を開発しています.
下肢関節角度やストライド長などの歩行データを簡単に計測できるシステムが実現すれば,歩行運動の定量的・客観的評価が可能になるので,リハビリテーションやヘルスケアなど様々な場面での応用が期待されます.そのため我々の研究グループでは,歩行リハビリテーション,歩行評価,車いすを駆動する上肢運動評価などへの応用を目指して,以下のような研究を行っています.
・ 加速度センサとジャイロスコープを用いたワイヤレスウェアラブルセンサシステムの開発
・ 角度,歩行事象,ストライド長などの評価指標の算出アルゴリズムの開発
・ 計測結果の可視化アプリケーションの開発
・ 運動機能障害者の歩行評価に関する研究
・ 実環境での車椅子駆動時の上肢運動計測に関する研究
/keisokusystem111.png)
|

|
歩行評価パラメータ算出アルゴリズムの開発
○ カルマンフィルタを用いた下肢角度算出法
開発した計測システムでは,原理的には,身体の各部位に装着したセンサから得られる角速度を積分することで角度を算出しています.しかし,単純に積分した結果では,積分による誤差が蓄積し,計測結果正しくありません.そのため,本研究の方法では,加速度センサを用いて算出した角度を利用して,カルマンフィルタを適用することで,蓄積した誤差の補正を行っています.
これまで,健常者を対象とした計測精度評価実験により,実用的な精度で計測できることを確認しましたが,計測部位や歩行速度,被験者の違いなどにより計測誤差にばらつきが見られたため,計測アルゴリズムの改良を行っています.
/2D2.png)
|
| カルマンフィルタを用いた積分に基づく角度算出法のブロック図 |
現在の角度算出法は,実用的な精度で計測が行える一方で,矢状面内の運動の計測を対象としており,片麻痺患者などに見られるぶん回し歩行のような,矢状面に限定されない動きについては検証が十分できていません.
本研究室では,上述の方法に加え,センサで計測した角速度,加速度から,3次元空間内の回転軸とその回り回転量を表すクォータニオンを算出し,これを用いることで,下肢の運動を3次元的に計測する手法についても検討を行っています.
これにより,各関節の屈曲・伸展といった矢状面内の動作に加え,内外転や内外反を伴う3次元的な動作を計測,評価することで,リハビリテーション支援のための有用な評価指標の抽出が期待できます.
/image3.jpg)
|
| 3次元的な下肢角度算出方法のブロック図 |
クォータニオンを用いる方法では,慣性センサから得られる角速度データと加速度データをそれぞれクォータニオンに変換し,カルマンフィルタをかけて誤差を補正することで,初期ベクトルからの回転量を計算します.
/image5.jpg)
|
| 各セグメントにおけるベクトル設定 |
/image13.jpg)
|
| 3次元的な歩行動作の様子 |
歩行の安定性の評価に関する研究
実際にFESを下肢の制御に応用する場合,転倒を予測し麻痺者の安全を最優先に考えることが重要です.また、リハビリの効果を評価するためにも,歩行の安定性を調べる必要があります.歩行の物理的な安定性は重心の動きから評価することができ,そのための解析方法を研究しています.
人間が行う二足歩行はとても不安定な動作です.そこで麻痺した下肢の運動機能再建を行う際には安定性を重視する必要があります. この研究の目的は,二足歩行の安定な条件を見つけ,より安全なリハビリや運動再建のテクノロジに貢献することです. 人間の体は複雑なシステムですが,物理的に解析すると重心の状態と重心にかかる力で振る舞いを解釈できます.そこで,人間の歩行をモデル化して,重心の位置と速度の条件で,あるタスクを行うために,必要な力が存在するかを調べることができます.このように制御可能な条件を安定な条件といいます. 理論で求めたものを実験によって評価し,安全な運動機能再建テクノロジの研究を行っています.
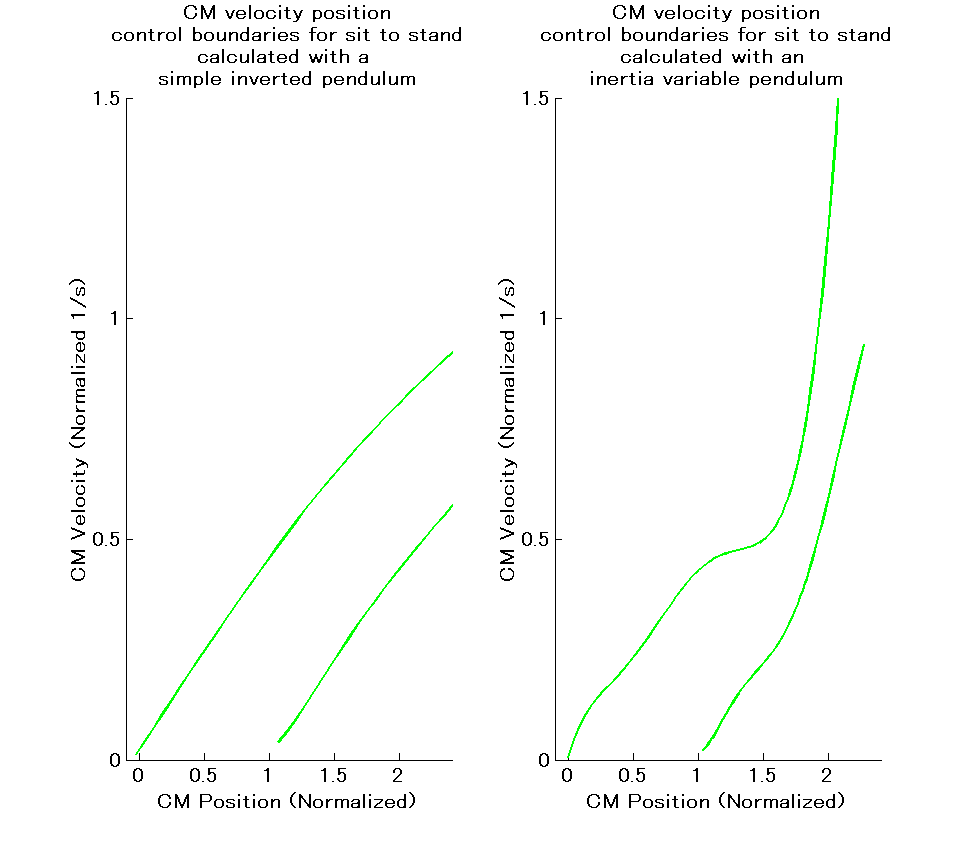
|
| 図1:左)簡単なモデルによるCMの状態のバランスコントロールの境 右) 慣性の影響を考慮したモデルによるバランスコントロールの境 |
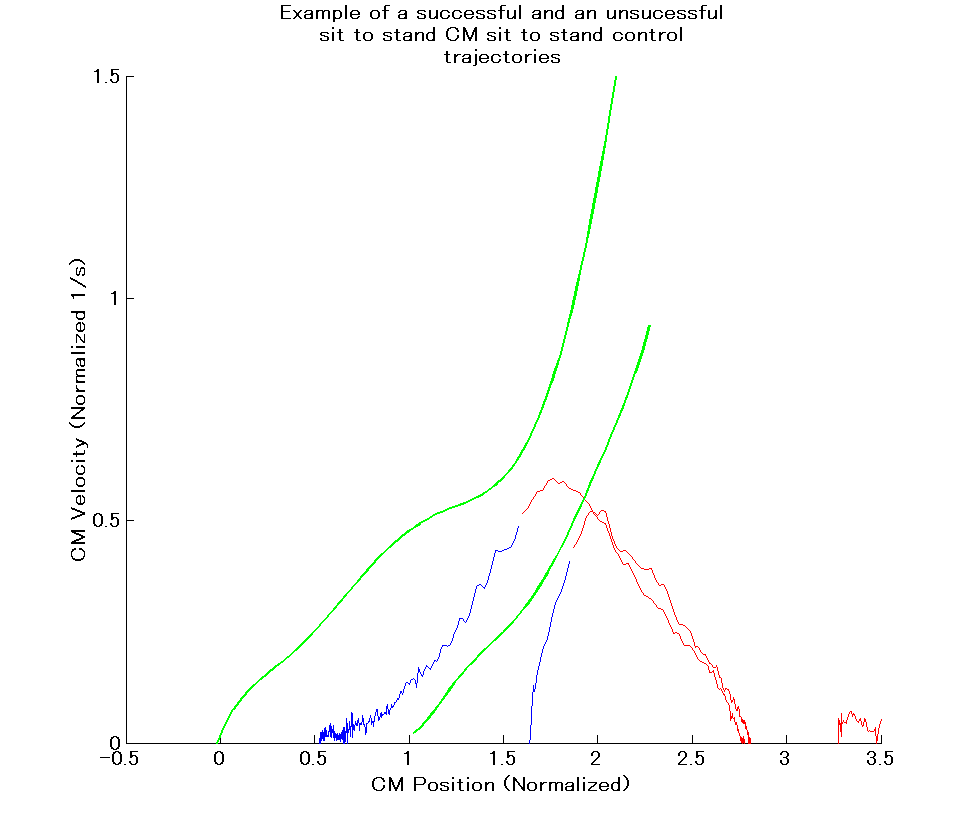
|
| 図2:実験的に測った立ち上がる動作の重心の軌跡.椅子を離れている状態を青い線で示している.離れるときに境の間にあると,正しく立ち上がりの制御ができるのに対して,境の外側のところで離れると制御不可能になって落ちる軌跡になる |