Research Areas 研究内容
機能的電気刺激(FES)
概要
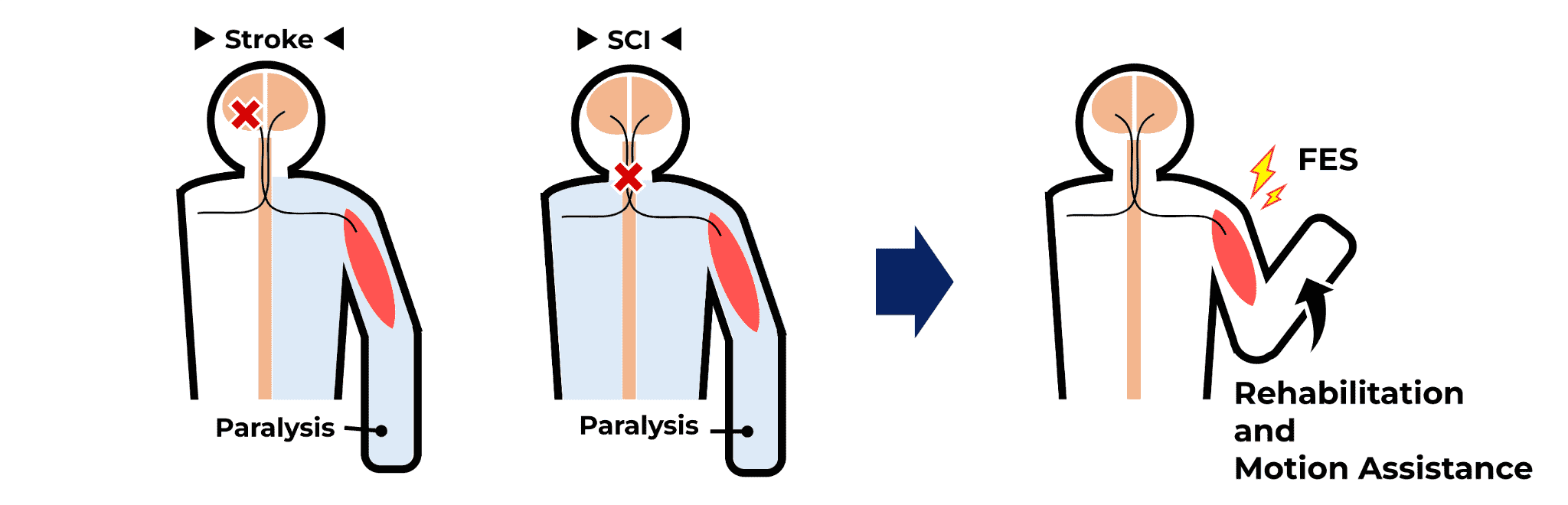
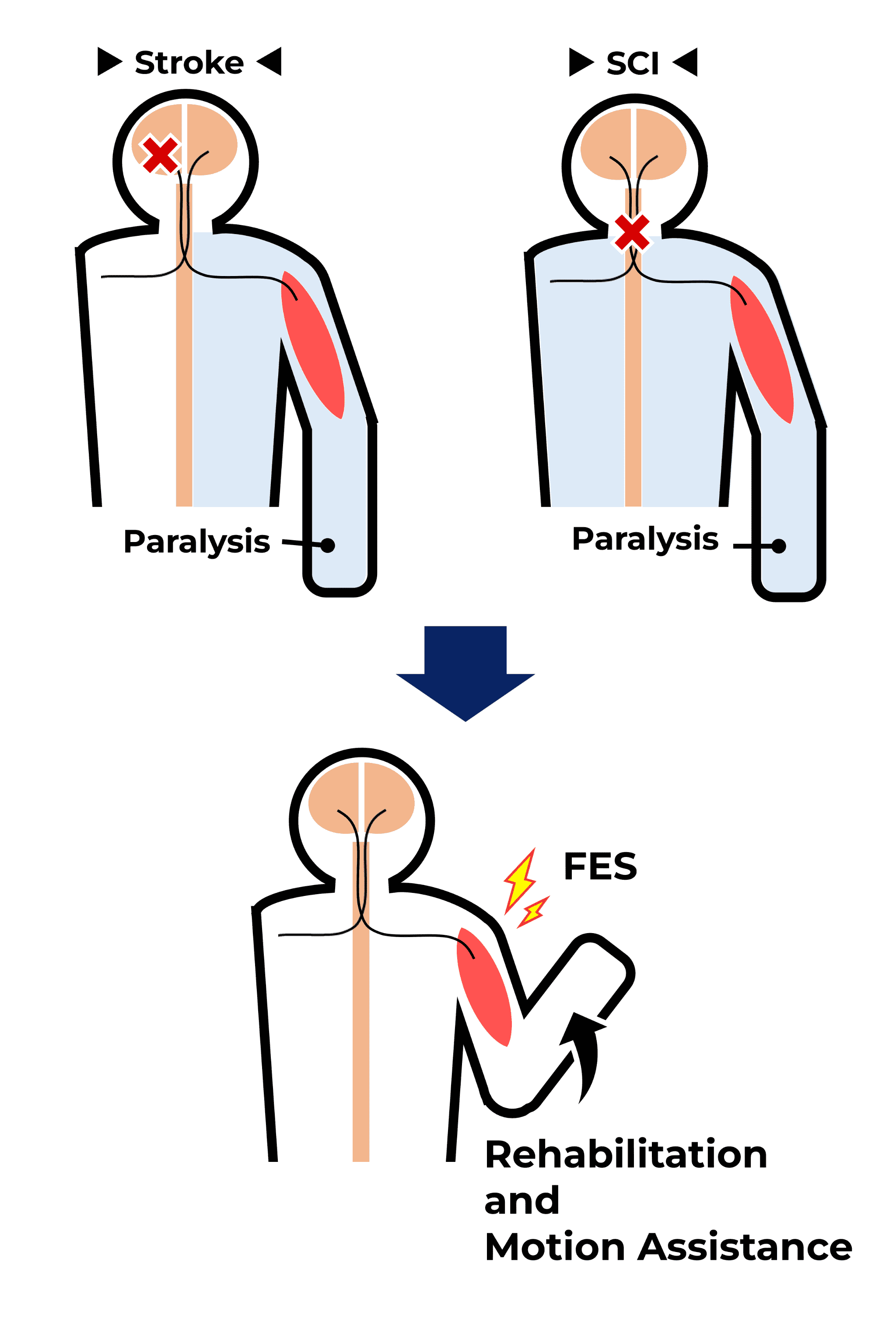
私たちが体を動かすとき、脳からの運動指令は電気信号として筋肉に伝わります。脊髄損傷や脳卒中などの脳血管疾患では、この電気信号の経路に問題が生じることで運動や感覚の麻痺が起こります。
しかし、運動を担う運動神経や筋肉が正常であれば、外部から電気刺激を与えることで筋肉を収縮させ、動作を生み出すことができます。この外部電気刺激によって動作を補助・再建する方法を機能的電気刺激(FES)と呼びます。
研究テーマ例①:
フィードバック誤差学習を用いたFES制御器
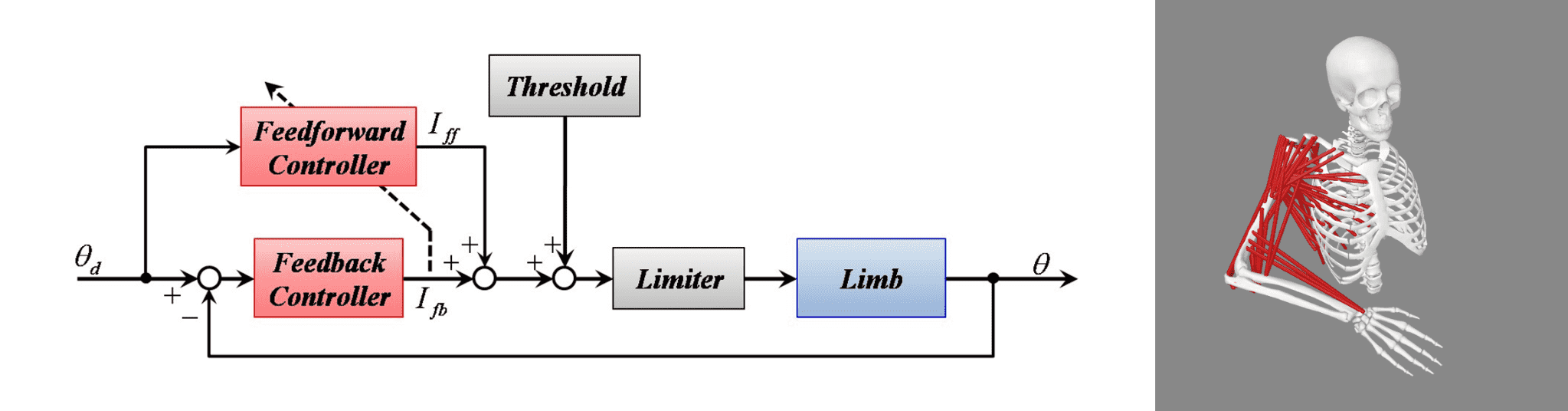
筋骨格系は非線形性や筋疲労、個人差の影響を受けるため、制御が非常に難しい対象です。渡邉研究室では、これらの非線形性や個人差に対応可能な高精度FES制御法を開発しています。
その一つがフィードバック誤差学習を応用したFESコントローラーです。人工ニューラルネットワーク(ANN)をフィードフォワード制御器として用い、制御中に対象の特性を学習することで、非線形性や個人差に対応可能となります。
近年は、筋骨格モデルを用いた事前学習により、患者負担となる事前計測回数の削減にも取り組んでいます。
研究テーマ例②:
足こぎ車椅子リハビリテーションシステム


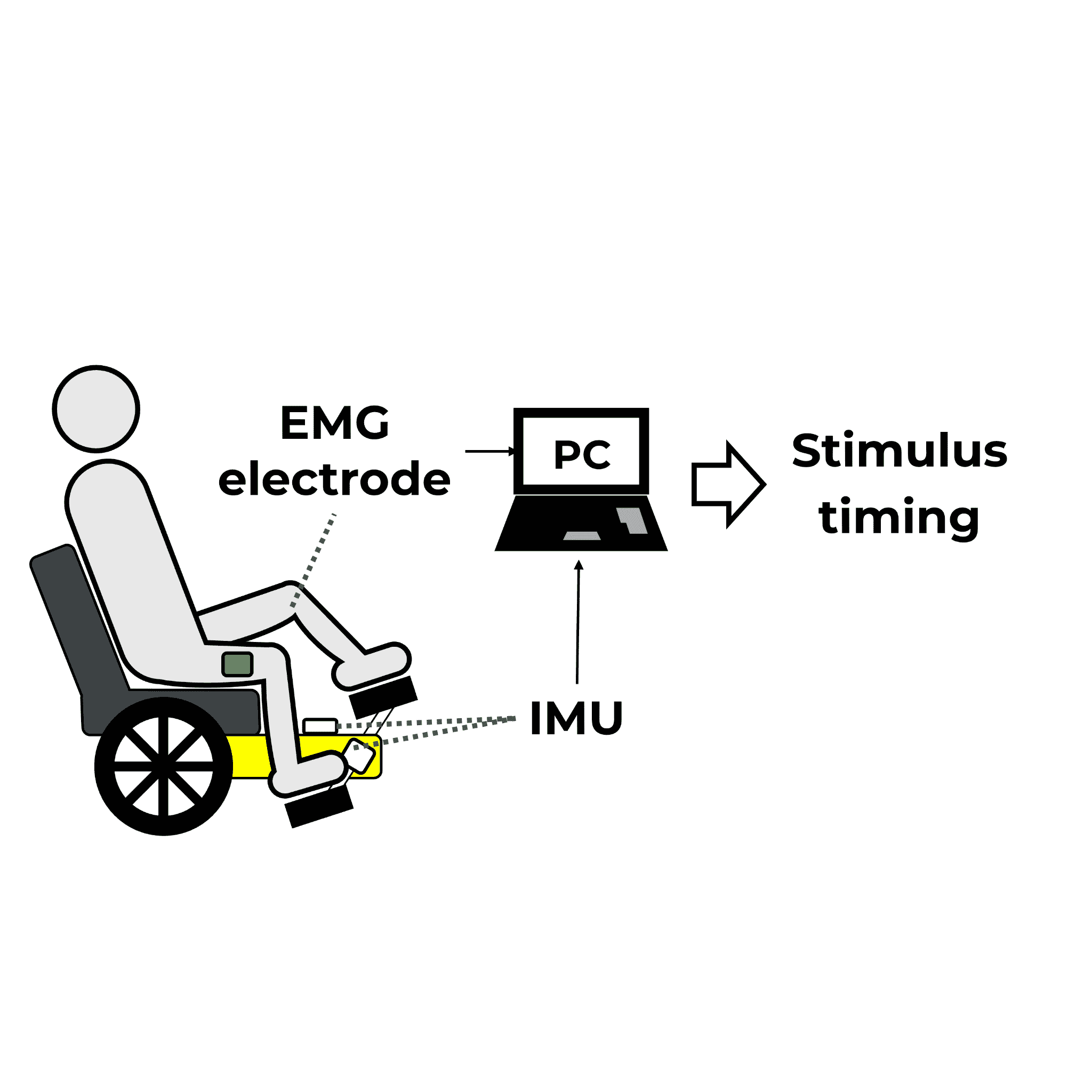
麻痺した四肢にFESを用いる際は、動作に応じた適切な強度・タイミングで刺激を与える必要があります。また、FESと自発運動を組み合わせることでリハビリ効果が高まることも分かっており、動作に応じたFESの活用が重要です。
渡邉研究室では、FESと足こぎ車椅子を組み合わせたリハビリ・移動支援の実用化に取り組んでいます。足こぎ車椅子は自転車のように足でペダルをこいで進む車椅子で、歩行が困難な高齢者や片麻痺患者でも自分の足で移動でき、廃用症候群(筋力低下や関節拘縮など)の予防にも効果が期待されます。
これまでにクランク角度に基づく刺激タイミング決定法を提案しており、近年は速度や個人差によって適切な刺激タイミングが変化する点にも着目し、実用化に向けた研究を進めています。
歩行分析・評価
概要
歩行評価は運動障害の理解や治療効果の評価に不可欠です。当研究室では、FES制御を支援する動作モニタリングツールの開発と、歩行動作の独立した評価・支援の両方に取り組んでいます。
研究テーマ例:
歩行の異常検知システム
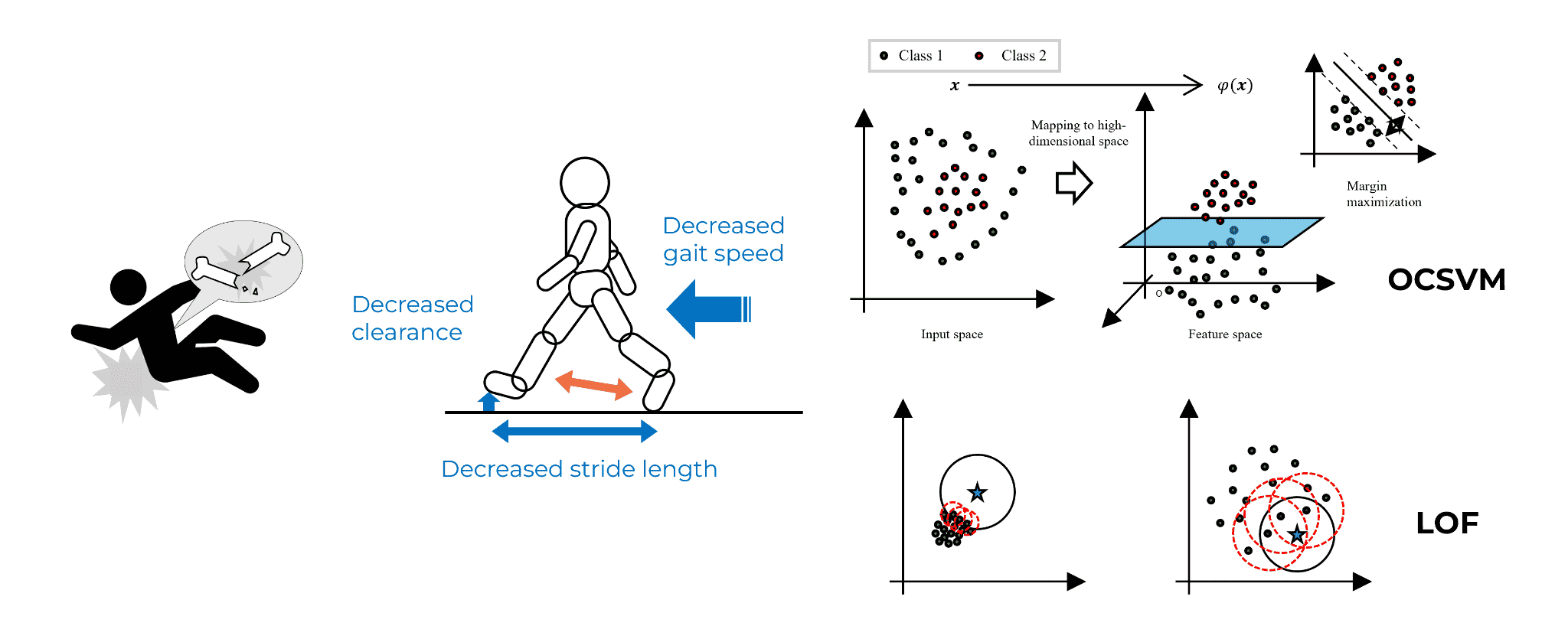
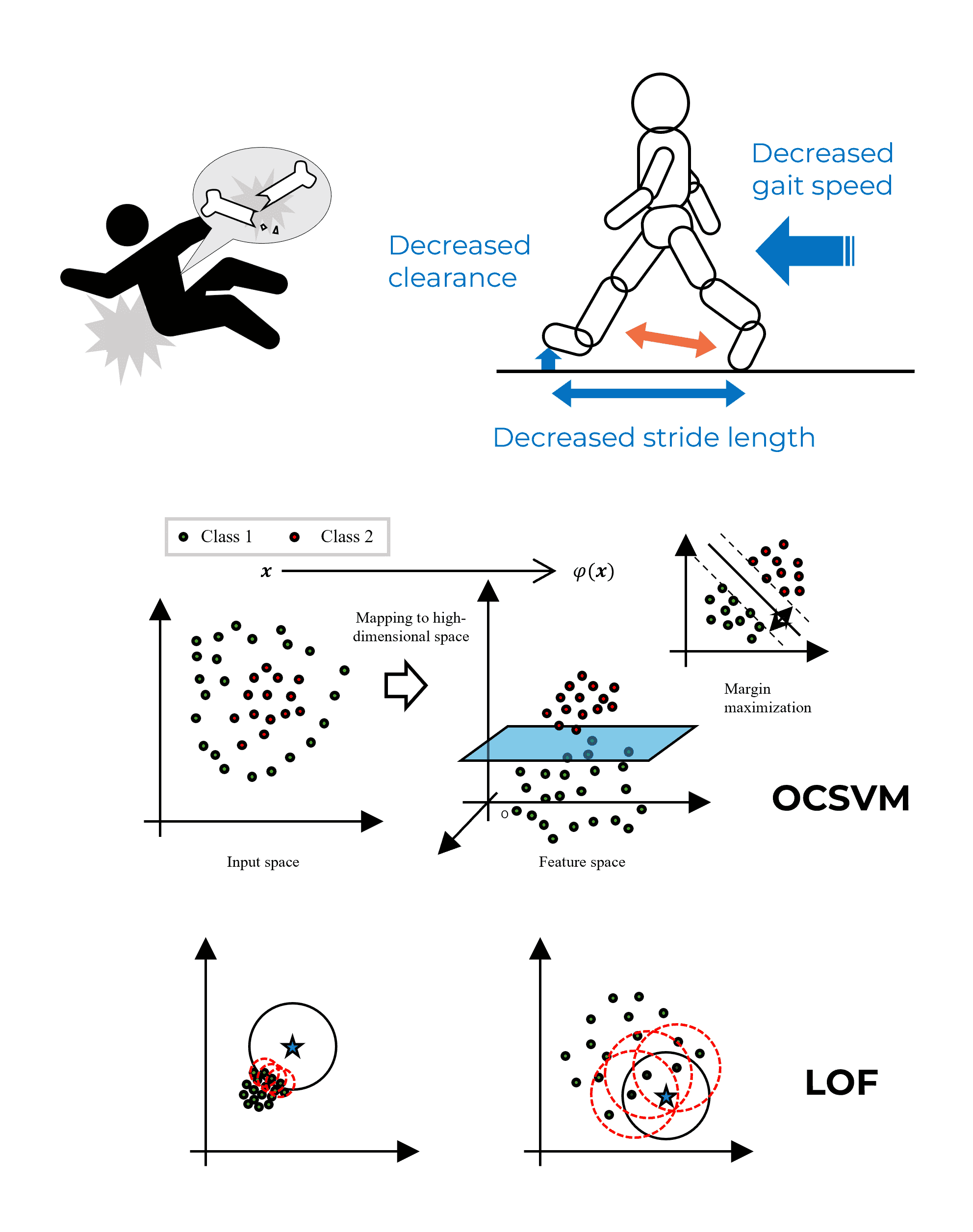
年齢を重ねると平衡感覚や筋力が低下し、片麻痺患者は特に転倒リスクが高くなります。病院での歩行検査は通常一度だけ実施されるため、日常生活での歩行パターンの微細な変化を検出することが困難です。
当研究では、小型の慣性計測ユニット(IMU)を用いて日常生活での歩行を計測し、AIを用いて各個人の「正常な歩行パターン」との違いを検出します。従来の教師あり学習では異常データの収集・ラベリングが困難なため、正常な歩行データのみに依存する教師なし学習を活用しています。
また、臨床現場でAIの判断をより理解しやすくするため、どの歩行指標や関節角度が変化したかを強調する可視化も実装する予定です。
研究室の設備
 慣性計測ユニット(IMU)
加速度・角速度を計測する小型センサ
慣性計測ユニット(IMU)
加速度・角速度を計測する小型センサ
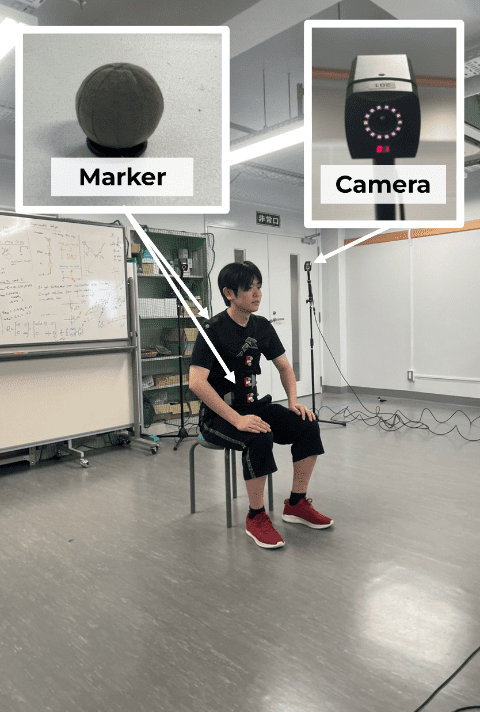 モーションキャプチャーシステム
カメラでマーカーを追跡し3次元動作を計測
モーションキャプチャーシステム
カメラでマーカーを追跡し3次元動作を計測
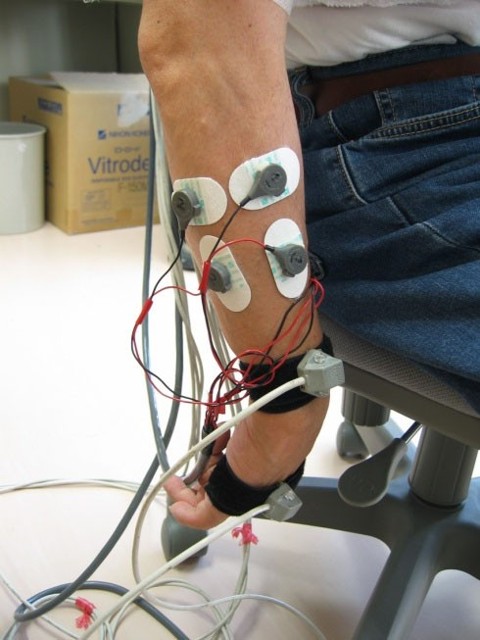 FESシステム
皮膚上の電極から電気パルスを印加
FESシステム
皮膚上の電極から電気パルスを印加
 トレッドミル
速度条件付き歩行実験に使用
トレッドミル
速度条件付き歩行実験に使用
 圧力センサ
足底の圧力分布と床反力を計測
圧力センサ
足底の圧力分布と床反力を計測
 個人用PC
プログラミングやデータ解析に使用
個人用PC
プログラミングやデータ解析に使用