Next-generation surgical support with AI, medical imaging, and 3D navigation
In liver cancer surgery, surgeons need to remove the tumor reliably while preserving as much healthy liver tissue as possible. This is difficult because the liver contains complex vascular structures that are not directly visible during surgery.
Hariyama Laboratory studies a liver surgery support system that combines 3D medical image analysis, AI, CT images, ultrasound images, and position sensing. The system connects preoperative planning with intraoperative navigation.
By reconstructing patient-specific liver structures on a computer, the system helps evaluate resection plans before surgery and presents important vascular and boundary information during surgery.
CT images are used to visualize the liver, blood vessels, and tumors, and to support planning of the resection area and remaining liver volume.
Intraoperative ultrasound, position and orientation sensing, and preoperative 3D models are integrated to present useful information during surgery.
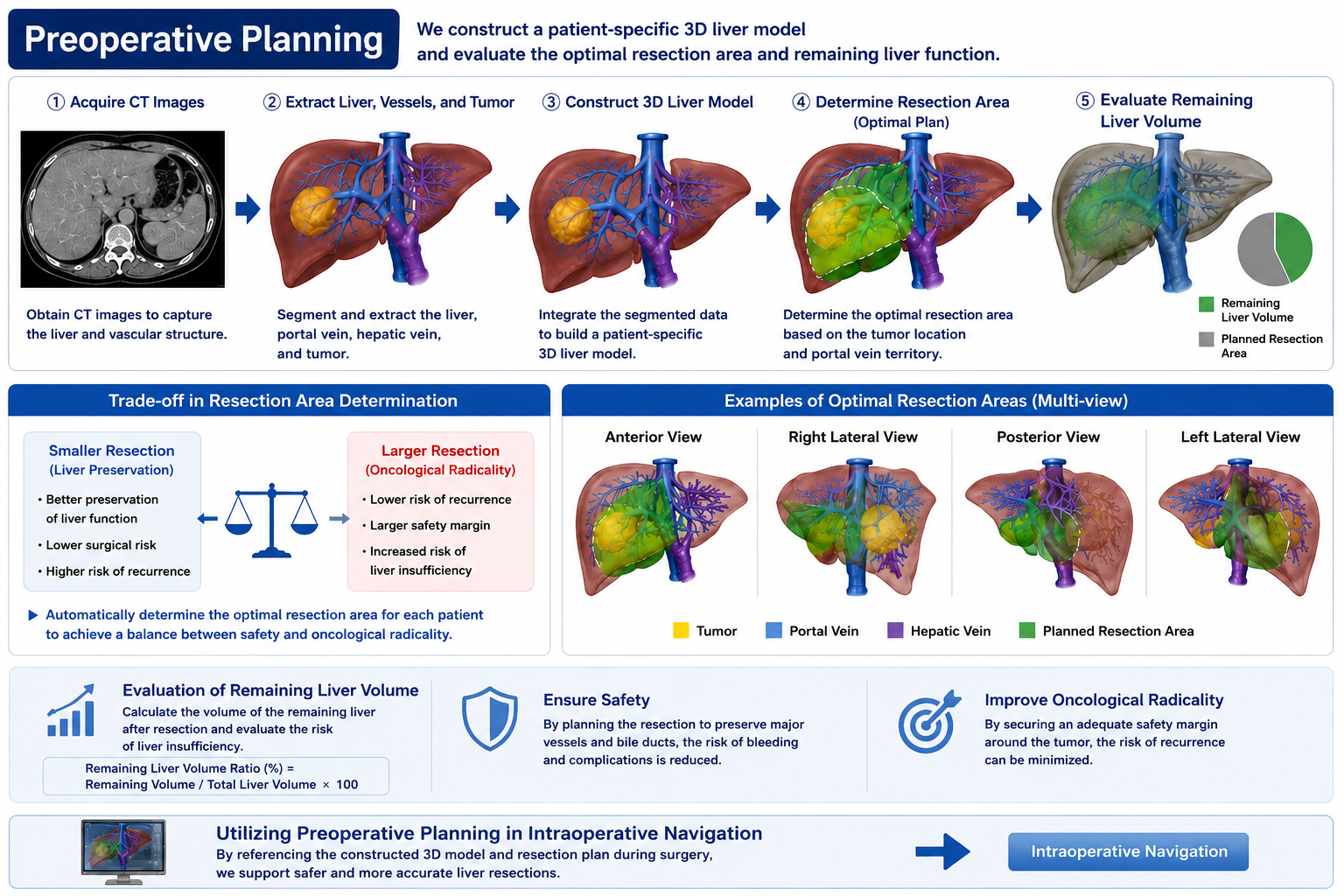
Preoperative Planning
In preoperative planning, the liver, vessels, and tumor are extracted from CT images, and a patient-specific 3D liver model is constructed. The system evaluates tumor location, portal and hepatic vein structures, candidate resection regions, and the remaining liver volume.
A smaller resection can preserve liver function but may increase the risk of recurrence. A larger resection can improve curability but may increase the risk of liver failure. Our goal is to help surgeons compare resection plans while balancing safety and curability.
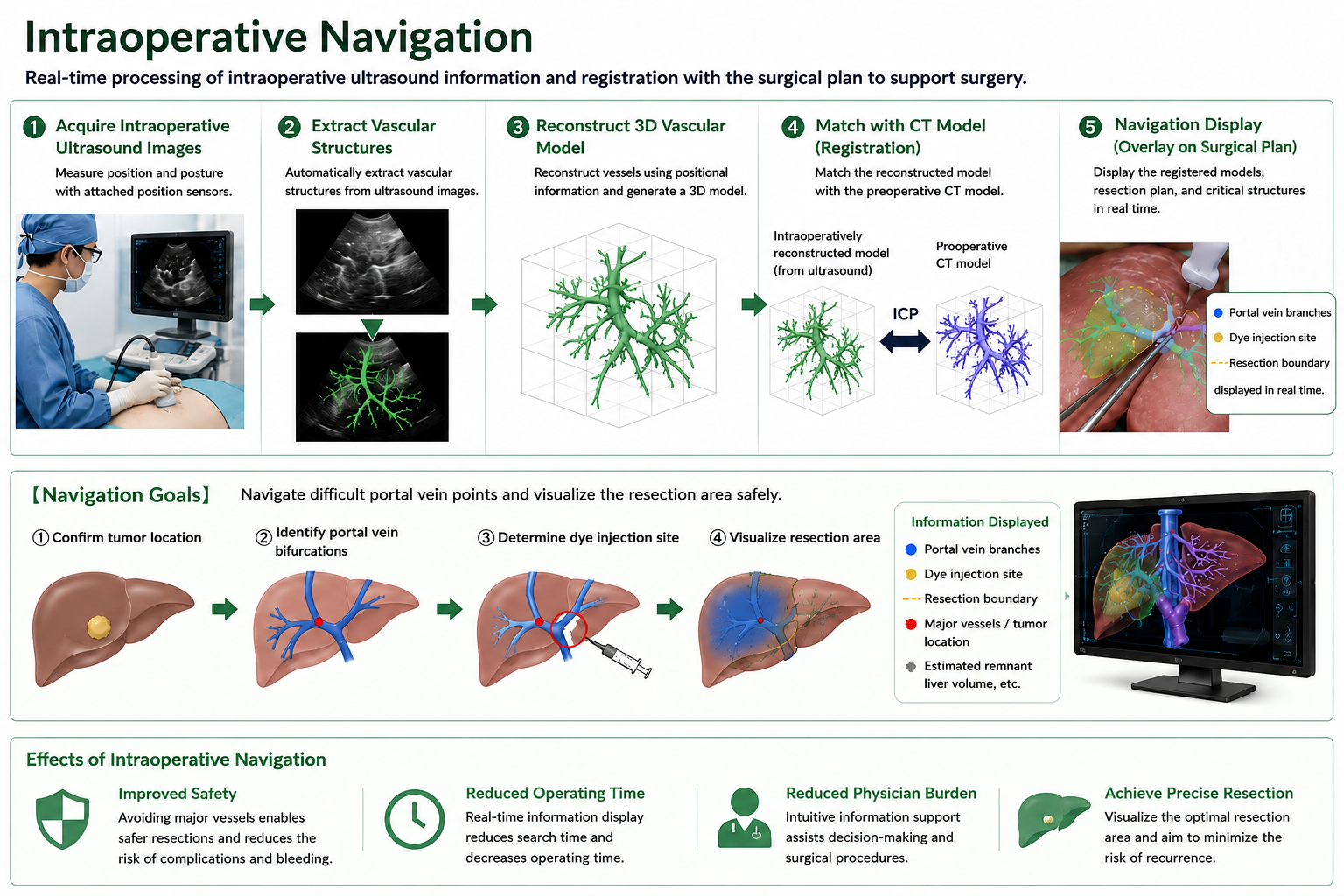
Intraoperative Navigation
To use a preoperative plan during surgery, the plan must be accurately aligned with information acquired in the operating room. We combine ultrasound imaging, position and orientation sensing, 3D reconstruction, and medical image matching to visualize internal liver structures in real time.
Blood vessel structures are extracted from intraoperative ultrasound images and reconstructed as a 3D vascular model. This model is then matched with the preoperative CT-based model so that important structures and vascular branch points can be presented to the surgeon.