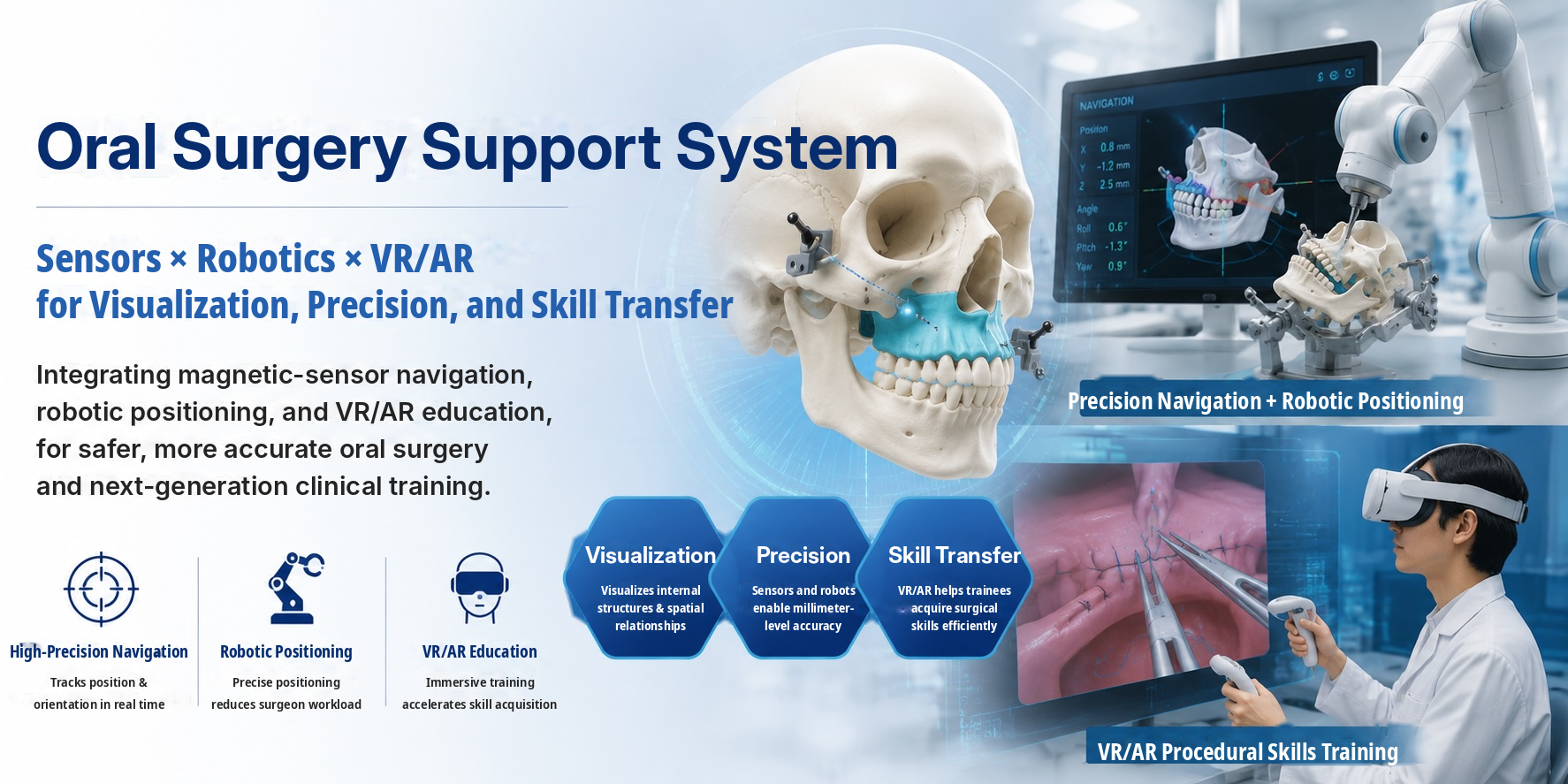
Sensor, robot, and VR/AR technologies for oral surgery
In oral and maxillofacial surgery, such as jaw deformity correction, cleft lip and palate treatment, and trauma surgery, bone segments must be moved and fixed at precise target positions. Even a small positioning error can affect chewing, speech, and facial appearance.
Many steps in current surgery still rely on the experience and skills of surgeons. It is also important to transfer expert surgical skills to younger clinicians. Hariyama Laboratory studies integrated support systems that make surgical information visible, improve positioning accuracy, and support skill acquisition.
Magnetic position and orientation sensors measure bones and instruments in real time and visualize differences from the preoperative plan.
Robotic positioning support helps guide bone segments toward the target pose with high accuracy.
VR/AR training environments help students and young clinicians learn expert surgical procedures repeatedly.
High-Precision Positioning with Magnetic Sensors and Robotics
In Le Fort I osteotomy, the maxilla is separated, moved, and fixed at the target position and orientation defined in the preoperative plan. Even small position or orientation errors can affect occlusion, speech, and facial appearance, so intraoperative support that measures the bone segment quantitatively and guides it toward the planned pose is essential.
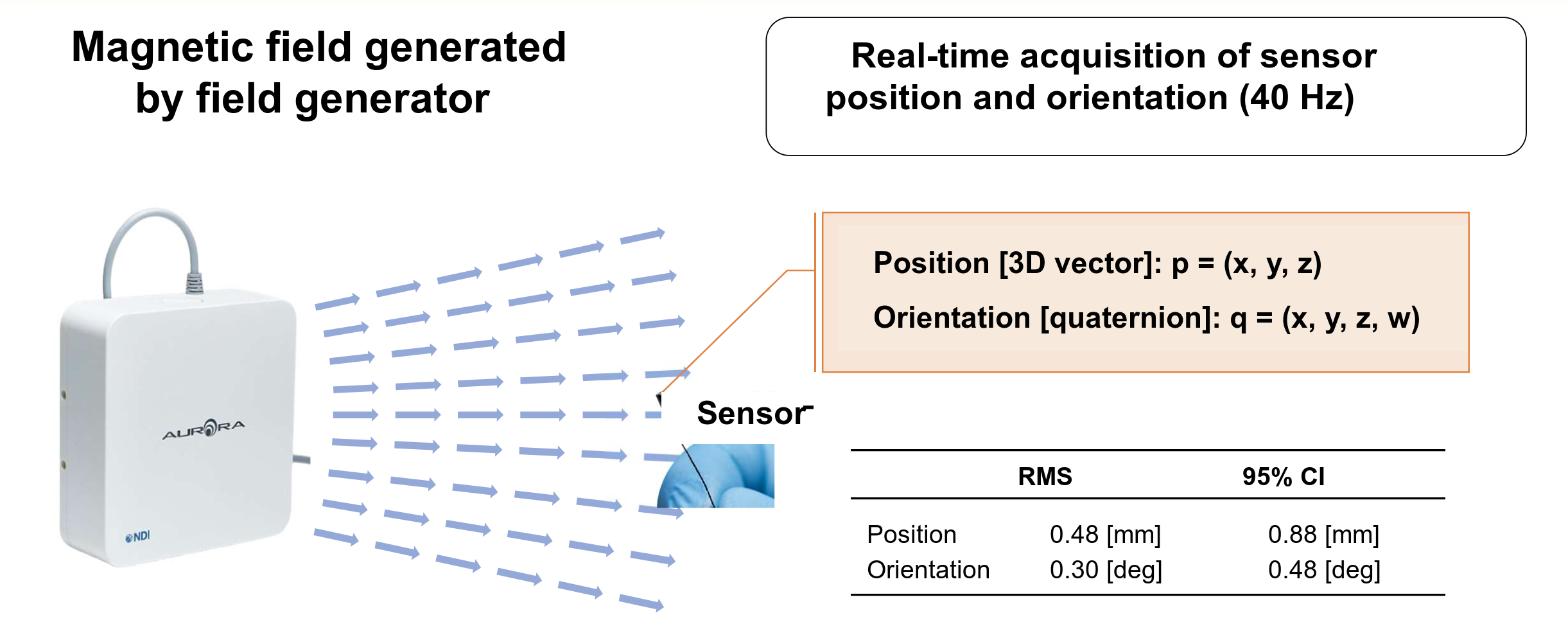
We use high-precision magnetic position and orientation sensors to acquire the real-time pose of compact sensors attached to bone segments and surgical instruments. Because the field generator creates a magnetic field, the system is less affected by camera blind spots and can stably measure position and orientation in the surgical environment.
The sensor information is also used for robotic control. By aligning the sensor coordinate system with the robot coordinate system, a robot arm can guide the maxillary bone segment moved in Le Fort I osteotomy toward the target pose while evaluating position and orientation errors.
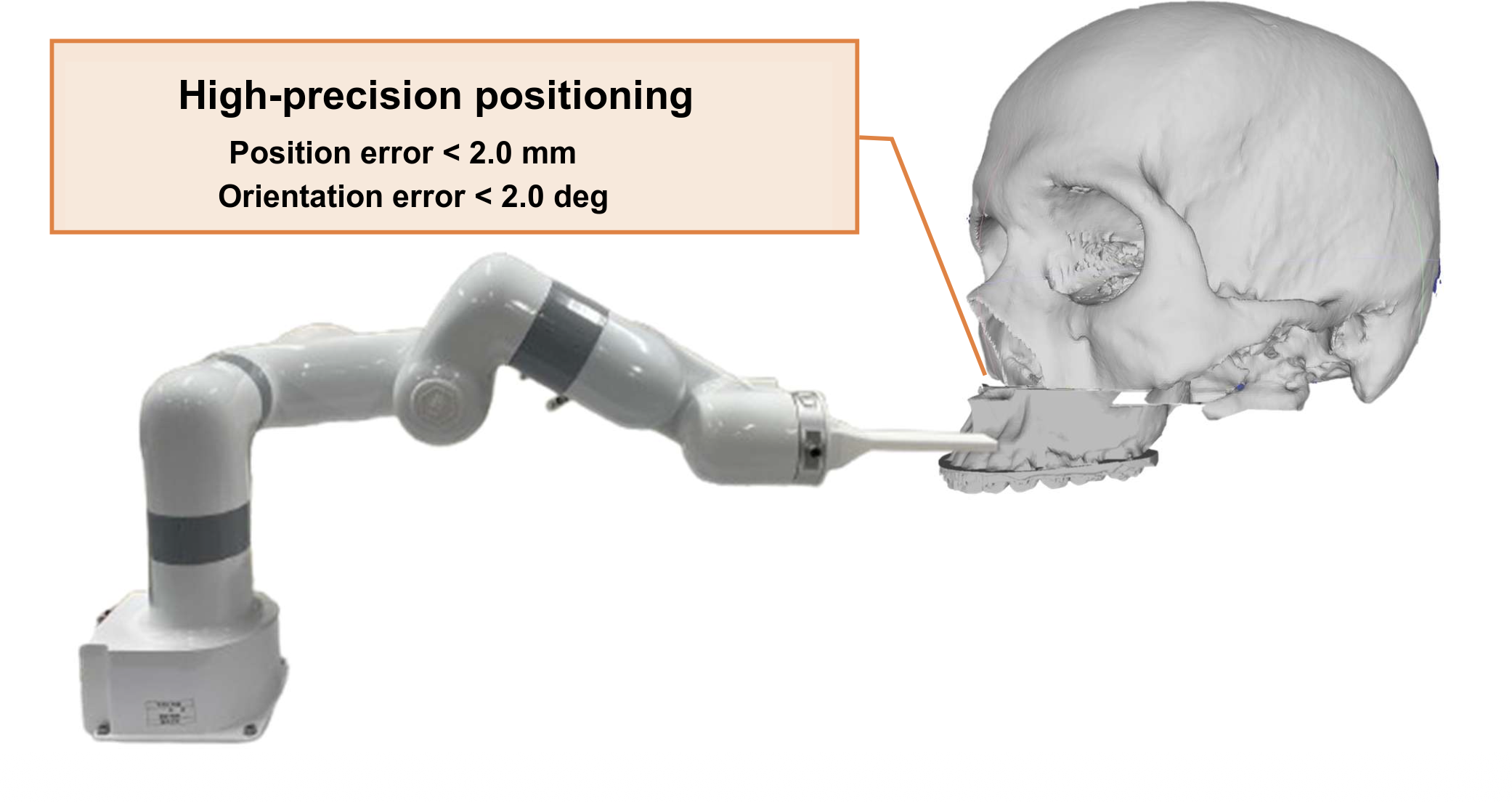
By combining intraoperative navigation with robotic positioning, this research integrates measurement, visualization, and operation support for more accurate surgery and reduced burden on surgeons.
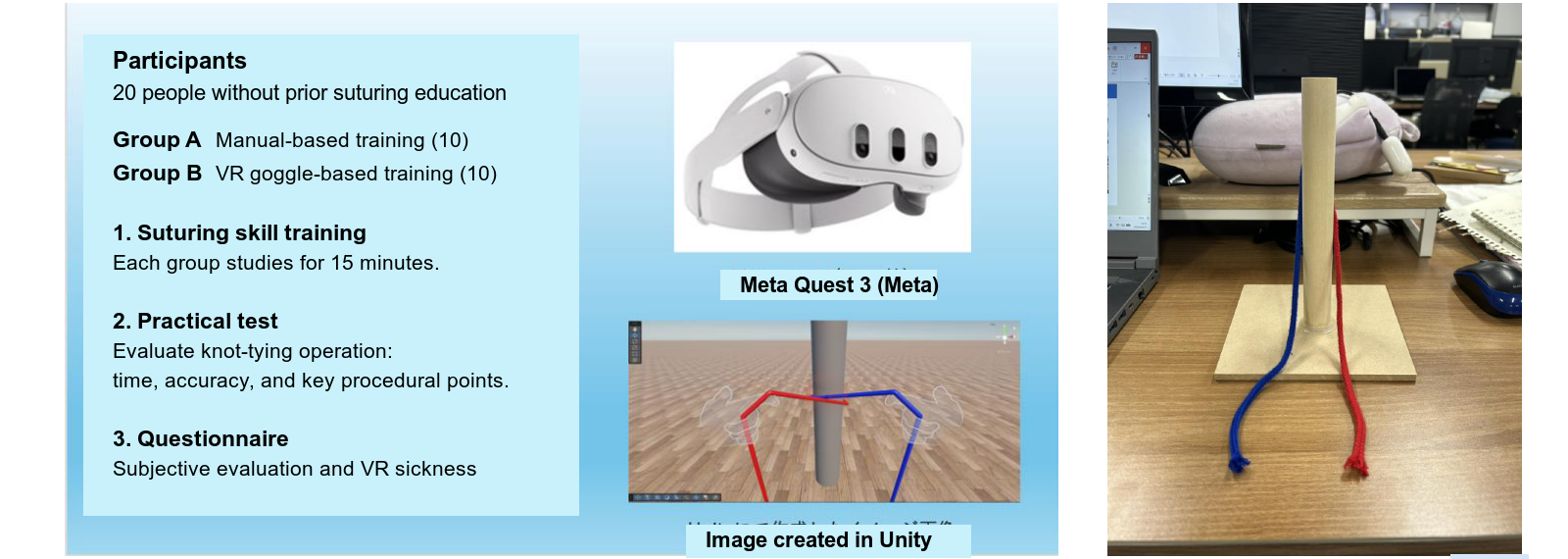
VR/AR-Based Surgical Skill Training
We also use VR/AR technologies to visualize expert surgical techniques and create training environments where dental students and young clinicians can practice repeatedly. This approach supports efficient skill acquisition and advanced medical education.
Future Direction
Our long-term goal is an integrated digital platform for oral surgery that connects diagnosis, preoperative planning, intraoperative support, and education through visualization, precision control, and skill transfer.