
センサー・ロボット・VR/ARによる次世代口腔外科支援
口腔外科では、顎変形症や口唇口蓋裂、外傷などに対して、顎骨を切離し理想的な位置へ移動させる手術が行われます。このような手術では、数ミリメートル以下の精度で骨を位置決めする必要があり、患者の咀嚼機能や発音機能、顔貌に大きく影響します。
しかし現在の手術では、骨片の位置決めや固定作業の多くが医師の経験や熟練技能に依存しており、高精度な位置決めを安定して実現することは容易ではありません。また、熟練医の技術を若手医師へ継承することも重要な課題となっています。
張山研究室では、高精度磁気式位置・姿勢センサー、ロボットによる高精度位置決め、VR/ARを活用した教育支援を統合した口腔外科手術支援システムの研究を進めています。
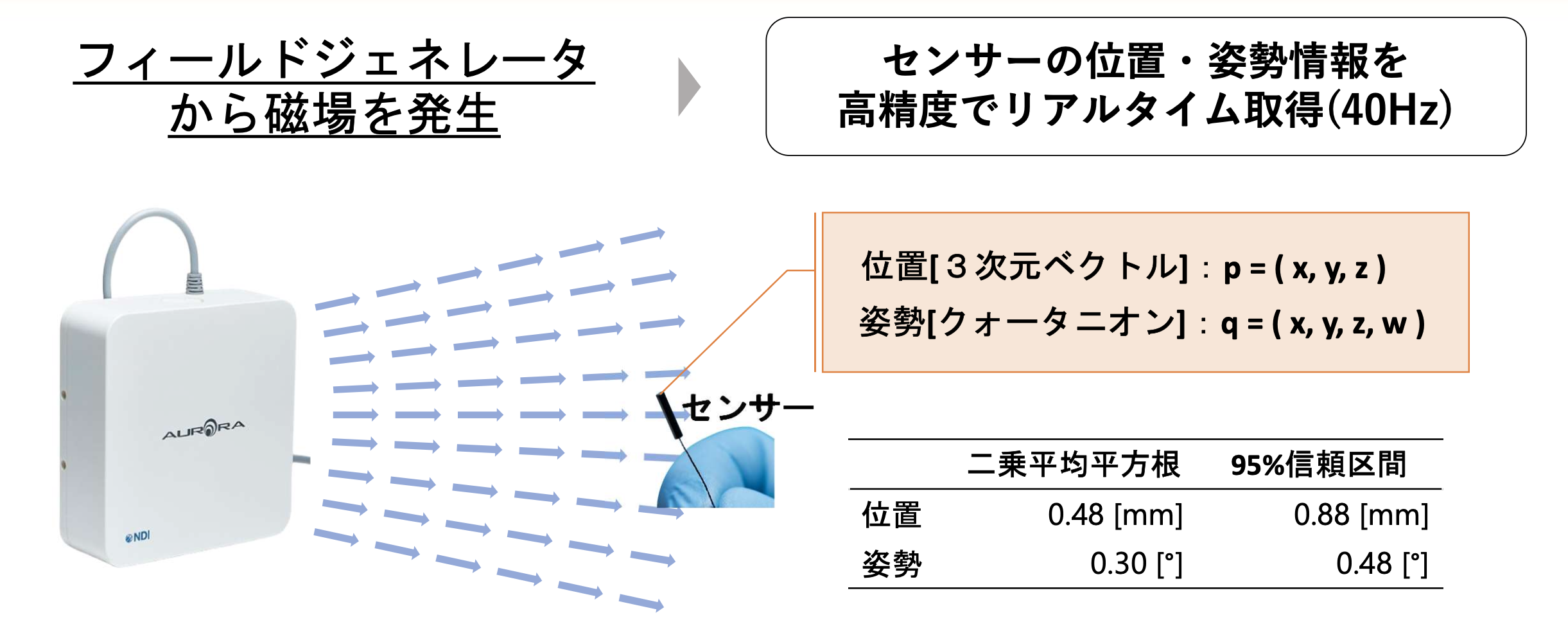
磁気式センサーで骨片や器具の位置・姿勢を計測し、術前計画との差分を可視化します。
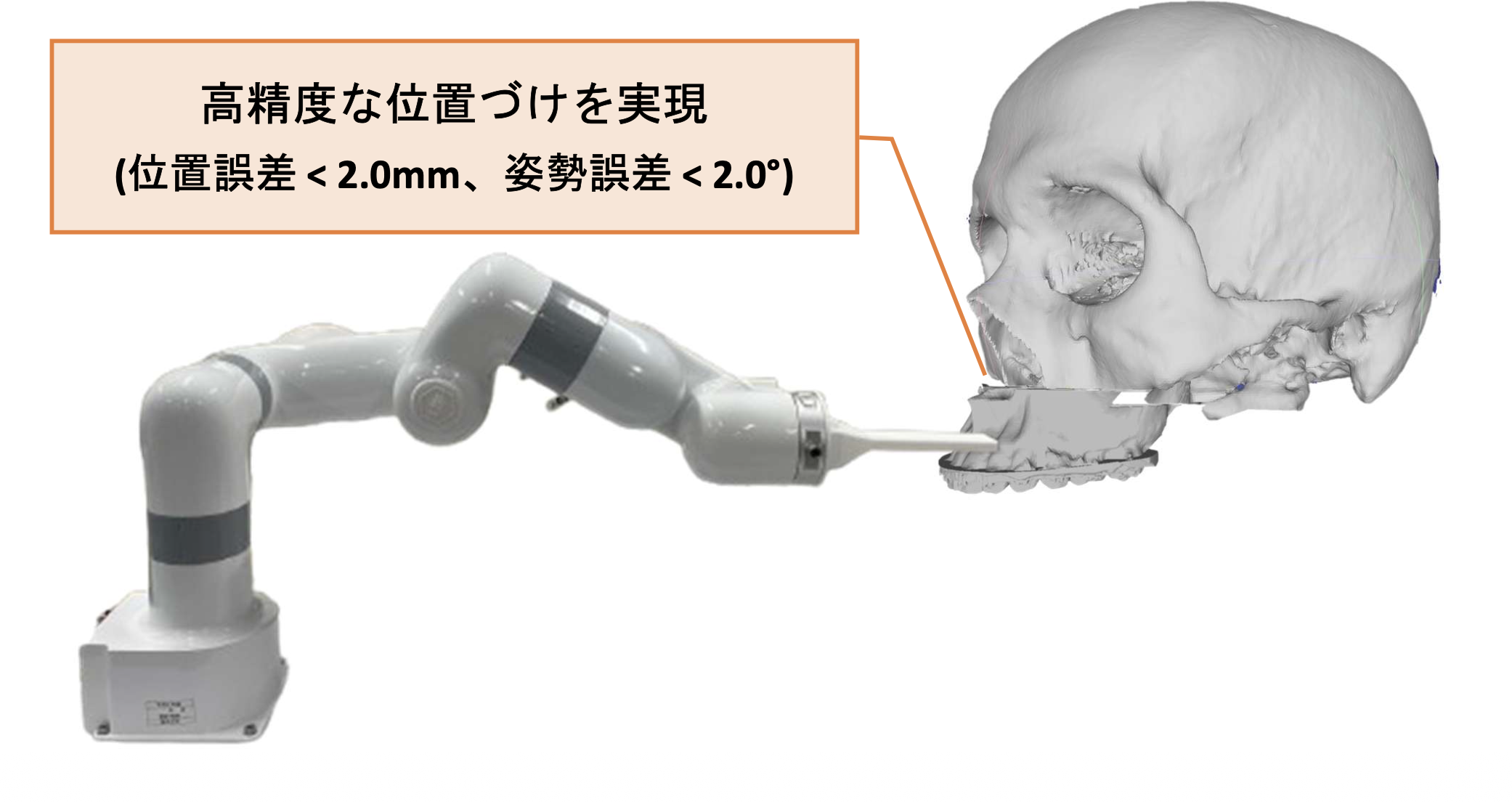
ロボット技術を活用し、骨片を理想的な位置へ高精度に誘導します。
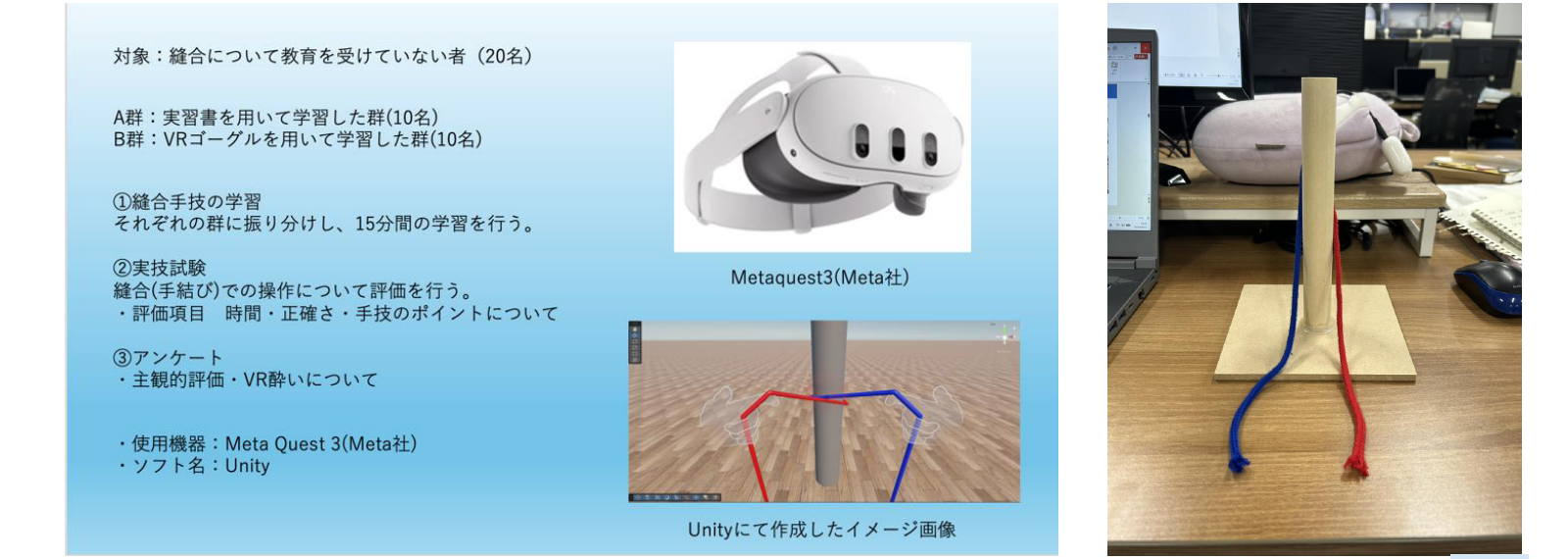
VR/ARで熟練医の手技を可視化し、若手医師が繰り返し学習できる環境を構築します。
高精度磁気式センサとロボットによる高精度位置決め
Le Fort I型骨切り術では、上顎骨を切離して骨片を移動し、術前計画で決めた理想的な位置・姿勢に固定します。わずかな位置ずれや姿勢ずれが咬合、発音、顔貌に影響するため、術中に骨片の状態を定量的に把握し、目標位置へ高精度に誘導する支援技術が重要です。
本研究では、高精度磁気式位置・姿勢センサを用いて、骨片や手術器具に取り付けた小型センサの位置と姿勢をリアルタイムに取得します。フィールドジェネレータから発生する磁場を利用することで、カメラの死角に影響されにくく、術中環境でも位置と姿勢を安定して計測できます。
さらに、センサで取得した位置・姿勢情報をロボットアームの制御に利用し、Le Fort I型骨切り術で移動させる上顎骨片を目標位置へ高精度に位置付けます。センサ座標系とロボット座標系を対応づけ、位置誤差と姿勢誤差を評価しながら操作することで、医師の経験に依存しすぎない精密な骨片位置決めを目指します。
磁気式センサによる術中ナビゲーションとロボットアームによる位置決めを組み合わせることで、Le Fort I型骨切り術における「計測」「可視化」「操作支援」を一体化し、手術精度の向上と術者負担の軽減につなげます。
VR/ARによる手技スキル習得支援
VR/AR技術を利用して熟練医の手技を可視化し、歯学部生や若手医師が繰り返し学習できるトレーニング環境の構築にも取り組んでいます。これにより、技術習得の効率化と医療教育の高度化を実現します。
将来展望
将来的には、「見える化」「高精度化」「技能継承」を実現する統合型デジタル手術支援基盤として、診断・術前計画・術中支援・教育を一体化した次世代口腔外科システムの実現を目指しています。