
本研究室で扱っている研究テーマ
FES制御
機能的電気刺激(FES=Functional Electrical Stimulation)とは
|
交通事故などによる 脊髄損傷 や脳卒中などの 脳血管障害 によって 運動機能や感覚機能の麻痺が生じることがあります. しかし,末梢の運動神経や筋は正常であることが多く, 電気刺激により筋を収縮 させることによって 動作を再建 できます. これが, 機能的電気刺激(FES) の基本的な考え方です.
FESを用いて麻痺した手足の動作を再建・補助するため,これまで多くの研究および臨床応用がなされています.

|

|
|
片麻痺者の肩を含む上肢の運動機能再建
(両下肢の制御) |
対麻痺者の歩行動作再建 |

|
|
| 四肢麻痺者に対するFESによる手と肘の制御 |
FESの制御対象である筋骨格系は,制御する関節角度の数よりも電気刺激する筋の数のほうが多いという冗長性があり,同じ動作を再建するための刺激パターンが複数存在します.
我々の研究グループでは,非線形性と冗長性がある筋骨格系を,安全に再現よくFESで制御し,動作を再建する方法を目指しています.
フィードバック誤差学習(FEL)のFES上肢制御への適用
ニューラルネットワーク(ANN)に対し,フィードバック制御器からの出力を用いて学習を進めます. これにより,制御を行いながらオンラインでフィードフォワード制御器の学習が可能となります.
|
ファジィ制御器による下肢の多関節制御
歩行中の下肢の動作は,股関節・膝関節・足関節(足首)の三関節が相互に影響し合う複雑な多関節運動となっています.
そのため,FESを用いて歩行動作の再建を行うためには,優れた多関節制御法が必要となります.
多関節制御法として,Cycle-to-Cycle制御法に着目をし,下肢の多関節制御法の開発を行っています.
|
無線型表面FESシステムの開発
FESで用いられるシステムは,刺激装置,電極,外部センサなど多くの機器から構成され,全体では大掛かりになることがあります. この研究では,機器間の通信を無線化し,小型で携帯性の高いFESシステムを開発することを目指しています. これにより,従来の大掛かりな外観からくる抵抗感と負担を低減することができます.
|
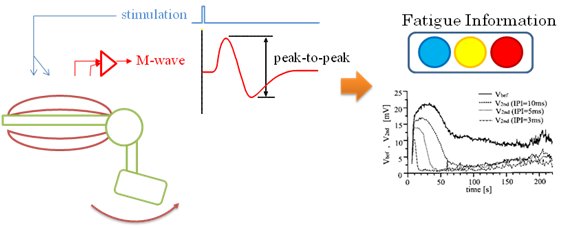
誘発筋電図(M波)を用いた筋疲労評価とその応用
麻痺や病気でFESを使用する患者さんでは疲労の感覚がわかりにくいことや,健常者に比べて疲労を早期に誘発するという問題があるため,何らかの手法を用いて筋疲労の測定,評価を行う必要があります. この研究では,刺激に同期した筋系の興奮状態を電気的に観測したM波を用い,筋疲労評価を行っています.
|
リハビリ・健康支援
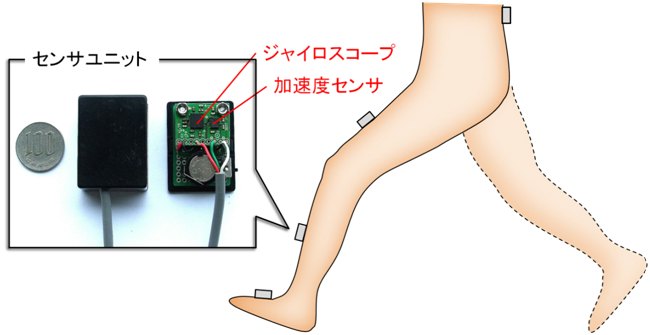
簡易歩行解析のためのウェアラブルセンサシステムの開発
下肢関節角度や歩幅などの歩行データを簡単に計測できるシステムが実現すれば,歩行運動の定量的・客観的評価が可能になるので,リハビリテーションやヘルスケアなど様々な場面での応用が期待されます.そのため我々の研究グループでは,小型軽量で安価なセンサである加速度センサとジャイロスコープを用いた,簡易歩行解析のためのウェアラブルセンサシステムの開発を目指しています.
|
二足歩行および起立動作の安定性評価
実際にFESを下肢の制御に応用する場合,転倒を予測し麻痺者の安全を最優先に考えることが重要です.また、リハビリの効果を評価するためにも,歩行の安定性を調べる必要があります.歩行の物理的な安定性は重心の動きから評価することができ,そのための解析方法を研究しています.
|
|
| 重心と支持基底(BOS)との関係 | 一般的な起立動作時の重心の動きと安定限界 |
インターフェイス
触覚ディスプレイを用いた情報提示手法の開発
皮膚感覚は視覚や聴覚に代わる情報伝達の手段として重要で,FESや義肢を使用する場合には制御の命令や状態を使用者に示す際に有効になります.このとき,電気刺激を用いた提示手法では,電極を装着するだけで良いため,小型で簡単な提示装置にできる利点があります. この研究では,電気刺激により生じる感覚を用いて情報提示を行うことを目指しています.
|
高齢者の自動車運転支援用インターフェイス
高齢者の運転免許保有者数の増加とともに,高齢者が第一当事者である交通事故件数も増加しています.この研究では,振動刺激による危険情報提示により,運転中の高齢者の注意を促し,事故を回避することができるような手法を研究しています.

|